POGLAVLJE 3 - Zadatak 12:
Na mikrokontroler spojite jedan sedam segmentni pokazivač. Redom uključujte segmente a,b,c,d,e,f. Neka je svaki segment uključen 300 milisekundi. Kada ciklus završi neka trčanje krene ispočetka.
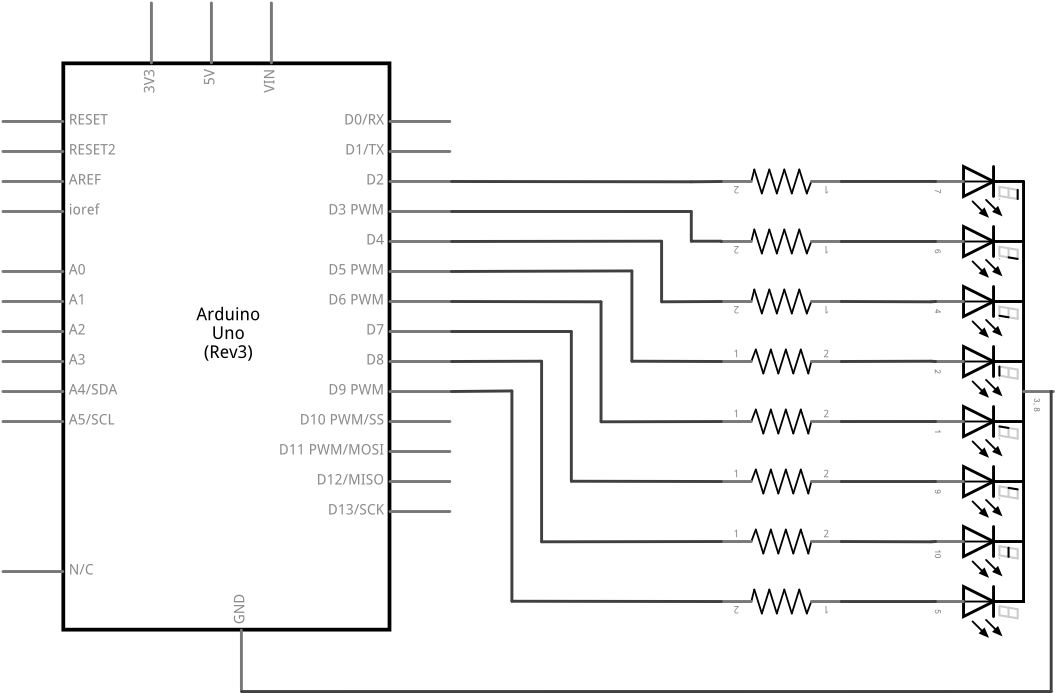
SHEMA:
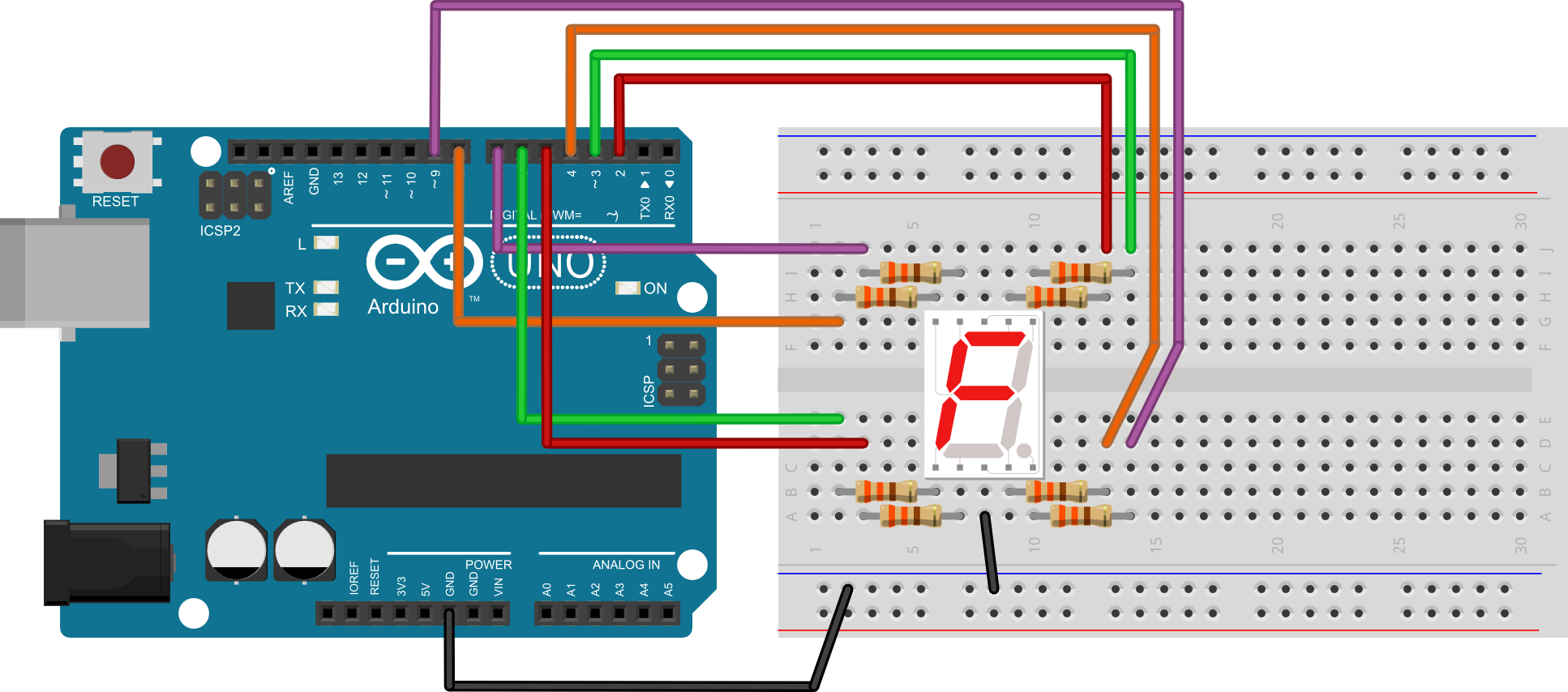
EKSPERIMENTALNA PLOČICA:
RJEŠENJE:
int segA = 2; //definiraj seg_a = 2 int segB = 3; //definiraj seg_b = 3 int segC = 4; //definiraj seg_c = 4 int segD = 5; //definiraj seg_d = 5 int segE = 6; //definiraj seg_e = 6 int segF = 7; //definiraj seg_f = 7 int segG = 8; //definiraj seg_g = 8 void setup() { pinMode(segA, OUTPUT); //postavi izvod segA kao izlazni pinMode(segB, OUTPUT); //postavi izvod segB kao izlazni pinMode(segC, OUTPUT); //postavi izvod segC kao izlazni pinMode(segD, OUTPUT); //postavi izvod segD kao izlazni pinMode(segE, OUTPUT); //postavi izvod segE kao izlazni pinMode(segF, OUTPUT); //postavi izvod segF kao izlazni pinMode(segG, OUTPUT); //postavi izvod segG kao izlazni digitalWrite(segA, LOW); //isključi a segment - početno stanje digitalWrite(segB, LOW); //isključi b segment - početno stanje digitalWrite(segC, LOW); //isključi c segment - početno stanje digitalWrite(segD, LOW); //isključi d segment - početno stanje digitalWrite(segE, LOW); //isključi e segment - početno stanje digitalWrite(segF, LOW); //isključi f segment - početno stanje digitalWrite(segG, LOW); //isključi g segment - početno stanje } void loop() { digitalWrite(segA, HIGH); //uključi a segment delay(300); //čekaj 300 ms digitalWrite(segA, LOW); //isključi a segment digitalWrite(segB, HIGH); //uključi b segment delay(300); //čekaj 300 ms digitalWrite(segB, LOW); //isključi b segment digitalWrite(segC, HIGH); //uključi c segment delay(300); //čekaj 300 ms digitalWrite(segC, LOW); //isključi c segment digitalWrite(segD, HIGH); //uključi d segment delay(300); //čekaj 300 ms digitalWrite(segD, LOW); //isključi d segment digitalWrite(segE, HIGH); //uključi e segment delay(300); //čekaj 300 ms digitalWrite(segE, LOW); //isključi e segment digitalWrite(segF, HIGH); //uključi f segment delay(300); //čekaj 300 ms digitalWrite(segF, LOW); //isključi f segment digitalWrite(segG, HIGH); //uključi g segment delay(300); //čekaj 300 ms digitalWrite(segG, LOW); //isključi g segment }